AMOP – Autonomous Marine Operations Planning
AMOP - Autonomous Marine Operations Planning
The Autonomous Marine Operations Planning (AMOP) project is developing a suite of Artificial Intelligence (AI) methods that aim to optimise the efficiency of Antarctic field operations, while maximising science delivery. A core focus of this work is providing AI decision support for efficient management of the BAS marine fleet. This includes, but is not limited to, our research ship the RRS Sir David Attenborough (SDA) and our fleet of autonomous marine vehicles, such as Boaty McBoatface.
The AMOP project is a key component of our efforts to combat climate change, aiming to minimise the use of fuel when delivering science in the polar regions. It is of paramount importance to meeting our goal of Net Zero Carbon by 2040. The work undertaken by AMOP is explained in more detail below:
Digital Environment Model for Marine Vessels – MeshiPhi
By processing the huge quantities of data available from satellite and in-situ observations, as well as forecasts and models, MeshiPhi allows AMOP to create a detailed digital model of the environment.
One use of this model is to aid the safe and fuel-efficient navigation of polar vessels operating in the region, including the SDA and other UK research vessels. MeshiPhi makes use of all the relevant environmental data needed for polar operations, allowing us to work out how a vessel or vehicle will respond to different situations and scenarios. An everyday analogy would be, when traveling from London to Cambridge, one could travel on a motorbike, in a car or on a bus. Each vehicle has a different top speed, can be driven through some areas rather than others and its optimal route would depend on environmental factors such as the road surfaces, weather and traffic conditions.
MeshiPhi creates the digital environment that enables us to compute these different factors quickly and efficiently, allowing us to use this information for other decision-making tasks in AMOP.
Environment–Aware Carbon Saving Route Planning – PolarRoute
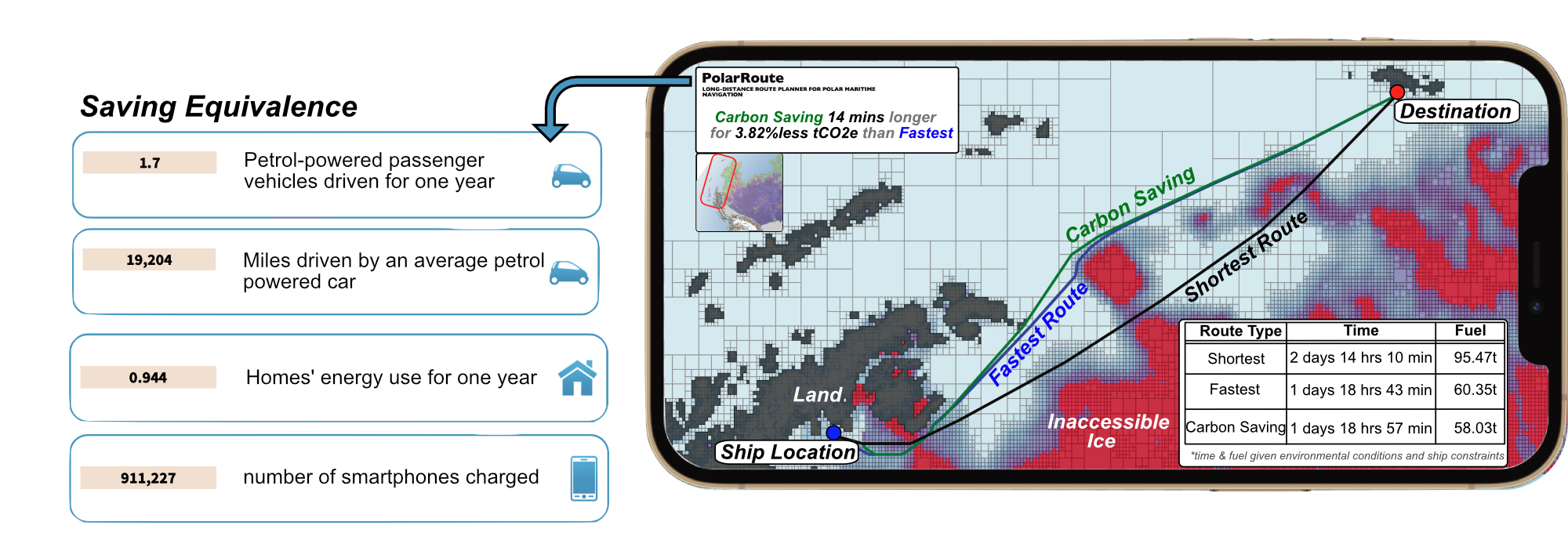
PolarRoute is an AI route planner that acts like a Google Maps for the polar oceans. It can take the environment model generated by MeshiPhi and plan the optimal route between a set of points for a given vessel in a given set of environmental conditions.
This will allow the navigation officers of any polar ship to automatically plan routes the ship can take while on passage and when conducting scientific research. Planning any route in polar waters is a complex task that involves a multitude of factors and decisions. PolarRoute can make such calculations in a matter of minutes and navigators can choose between a Carbon Saving Route, and the fastest route.
- Carbon saving route. This allows a ship to travel on a route that uses less carbon which is crucial for our aim to reach net zero carbon across our operations. For example, a carbon saving route might take 15 minutes longer, but could save 3% in terms of carbon usage.
- Fastest Route. A faster route may well seem like the best option but is not always the optimal choice. For example, a faster route may require heading into heavy ice or a rough stretch of waters. Apart from the amount of carbon used to reach our destination in the fastest time, it could also run the risk of turning into a far longer route should ice delay the ship.
(View IceRouter for more details..)
PolarRoute is currently being tested onboard the SDA and significant updates and results will be shared when available.
Risk aware In Ice Navigation – IceRouter
A huge danger to all historic polar explorers was the risk of their ship becoming stuck in heavy or unexpected sea ice. Even today modern ships run the risk of being trapped for days or weeks at a time. Apart from the obvious problems caused by delaying the cruise and the disruption to scientific research or delay delivering supplies to Antarctic research stations, the carbon risks are extremely high.
Entrapment in ice results in more fuel being burnt for warmth and in attempts to extricate the ship. To deal with this challenge, AMOP are developing IceRouter. Functioning in a similar way to the automatic pilot on a self-driving car, IceRouter will help to provide advanced warning of routes that could lead ships into treacherous conditions.
Unlike PolarRoute which is designed to plan for multiple days to months in advance, IceRouter prevents entrapment in the short term and unexpected build-ups of ice. As with PolarRoute, it is hoped that once it is tested on the SDA it can be used to ensure more carbon friendly travel in polar regions and help to mitigate the risks of heavy sea ice.
Strategic Planning to Minimise Carbon Usage – VOLT
We are developing the VOLT AI planner to automatically generate strategic plans for the NERC fleet of ships and autonomous vehicles. Such a planner can be compared to Amazon’s AI work to ensure its fleets of vehicles sort, pack and deliver packages efficiently.
The calculations required to plan an itinerary for our fleet are hugely complicated and take highly skilled human planners months to prepare. AMOP can assist in this planning process, potentially reducing planning time to hours. However, the best laid plans can go awry and many of them may be out of date within hours of sailing and must be updated to account for changes at sea. An AI tool could allow plans to be rapidly updated to account for these changes in circumstance The uses of VOLT in this area are twofold.
- To reach our Net Zero Targets it is essential to optimise the use of shipping and autonomous platforms being developed to assist our scientists in their research. This is a new field for scientific research and in order to reach our targets we need to swiftly plan solutions for minimal fuel use to deliver on our Net Zero targets. VOLT will swiftly calculate how these solutions might work and keep us at the cutting edge of carbon efficiency and excellence in Marine Science.
- Planning for Future Marine Research Infrastructure (FMRI). It is clear we need a long-term plan to reach Net Zero by 2040. Whether low carbon fuels can be a long-term solution, and what technologies may become available in the coming years. The introduction of autonomous platforms for research is also a vast area of exploration. But along with all these new ideas come a set of constraints. For example, can ships and autonomous vehicles work in tandem to increase science return? How far does a ship need to travel if it is part of a fleet? How long will a glider’s battery last and what happens if rough weather means we damage or lose one of them? What research needs to be completed during a cruise and what could be left out or postponed? Is a particular set of weather conditions needed for the research to be completed, and how long will these last?
VOLT will take account of all these constraints and assess the different possible scenarios and their associated costs. For example, it could consider the costs and benefits of using a fleet of autonomous battery powered vehicles or one larger vessel to complete the same tasks. In the future, moving towards autonomy and reducing the human footprint in the polar regions could more than halve the carbon cost of science.
While these AI generated plans will advise, rather than replace, human planning expertise, they will give us a better idea of where to go as we plan our future clean marine projects. VOLT is currently undergoing testing and refinement but should start to help deliver results by the beginning of 2025.
Video 1 : VOLT-Platforms marine-glider fleet planning example. In this video we provide a proof-of-concept for the planning of 150 marine gliders as a swarm of autonomous vehicles collecting opportunistic science (demonstrated by the green regions) before going on to do pre-planned science surveys at the locations B1,B2 and B3. This glider fleet is deployed from the ‘Base’ location before being picked up at the rendezvous location, ‘RDV’. The routes taken by the gliders are determined by PolarRoute and include environmental factors.